Our American member Kenn has spent the last months fascinating everyone with his projects on unmanned autonomous vehicles, be they quadcopters or airplanes. So his offer to run a workshop on building your own little quadcopter was extremely well recieved. 12 hackers jumped at the chance and after a few trials and travails, hardware for 12 complete UAVs was finally delivered.


material to build 12 quadrocopters
Last week Sunday, we started hacking our remote controls. They needed to be changed from Mode 1 to Mode 2, flashed to the open-source Open9x firmware, and configured.
This Sunday, it was the tiny little brushless motor controllers turn to be hacked, flashing them with BLHeli in order to make them fit for the needed fast reactions. The flashed firmware can make the ESCs respond an order of a magnitude faster to input commands.
Precision is the word of the day, as good connections with tiny programming pads have to be made, over and over again. To make things even harder, the pads are hidden under heat shrink plastic. This has to be done a total of 60 times, as all the controllers needed to be flashed (4 for each quadcopter, plus some spares).
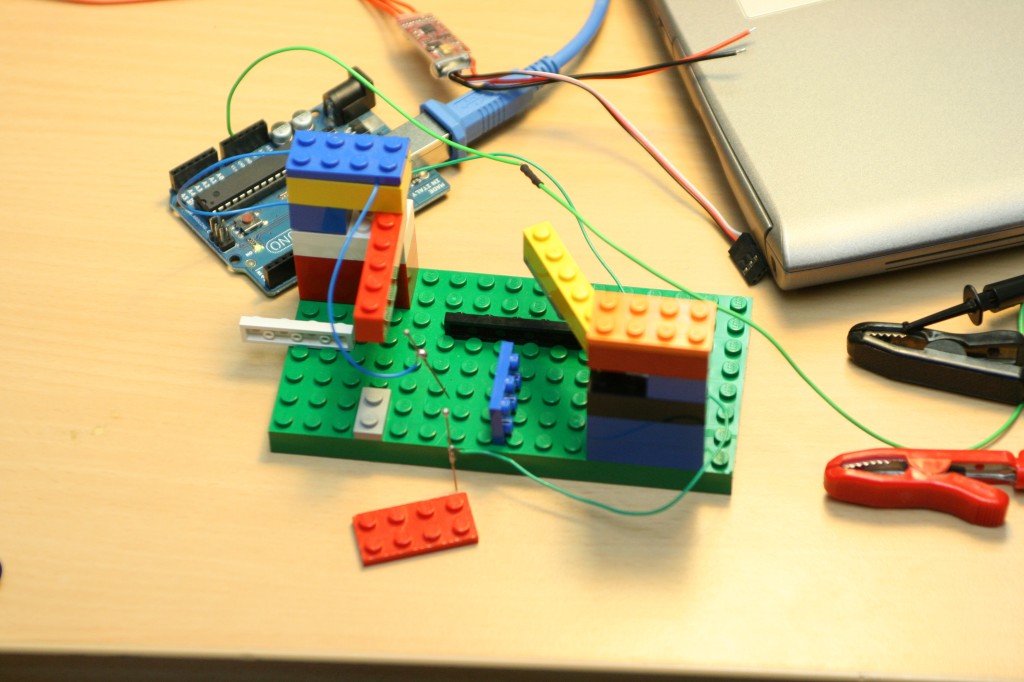
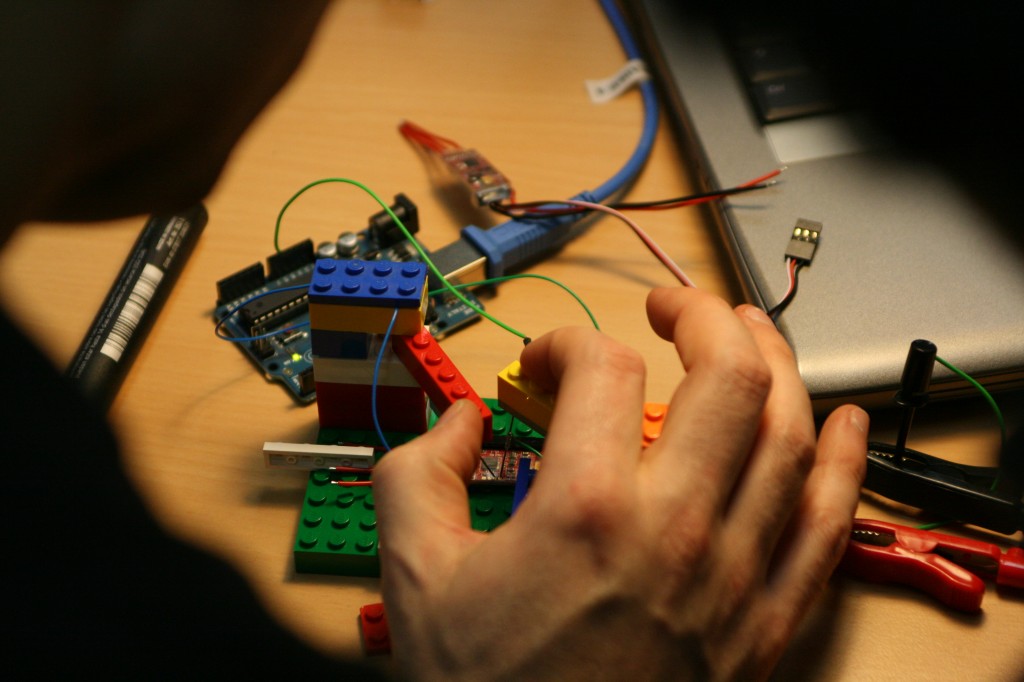
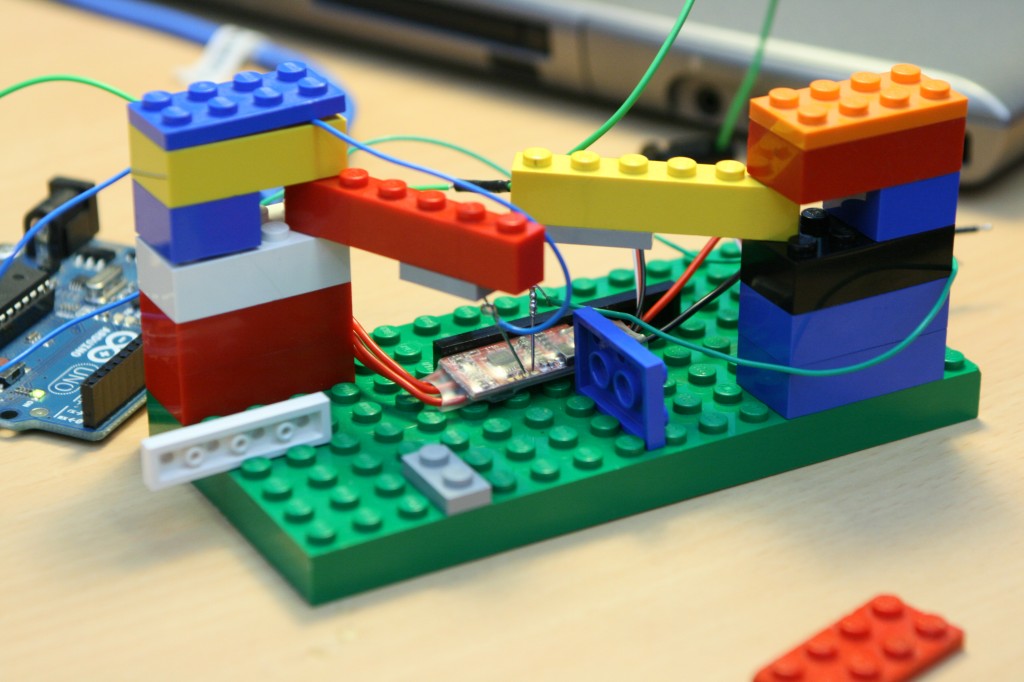
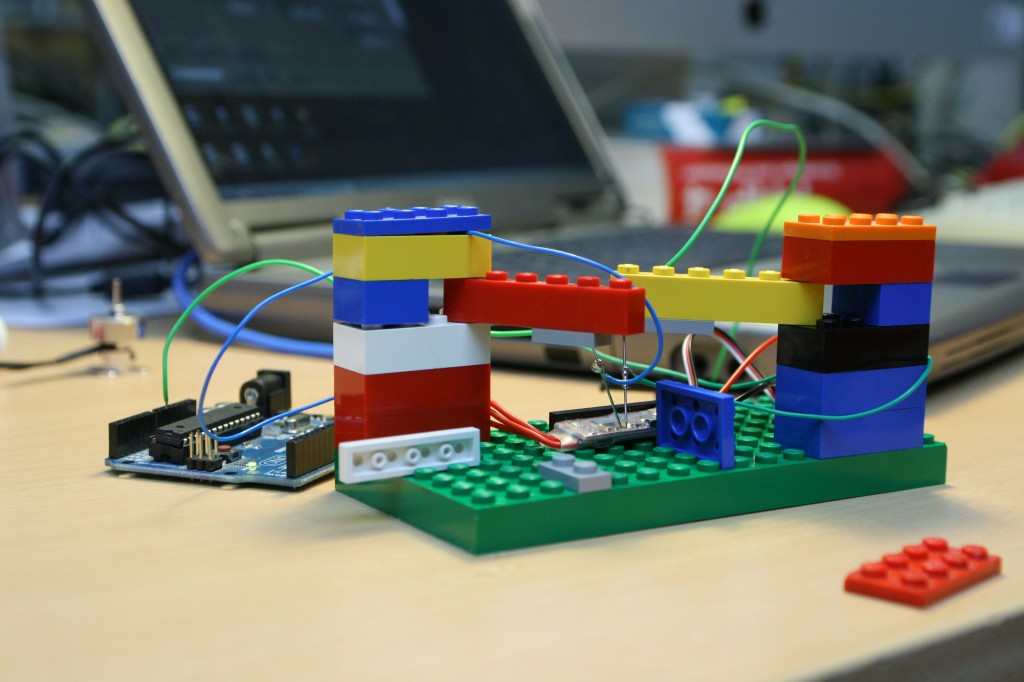
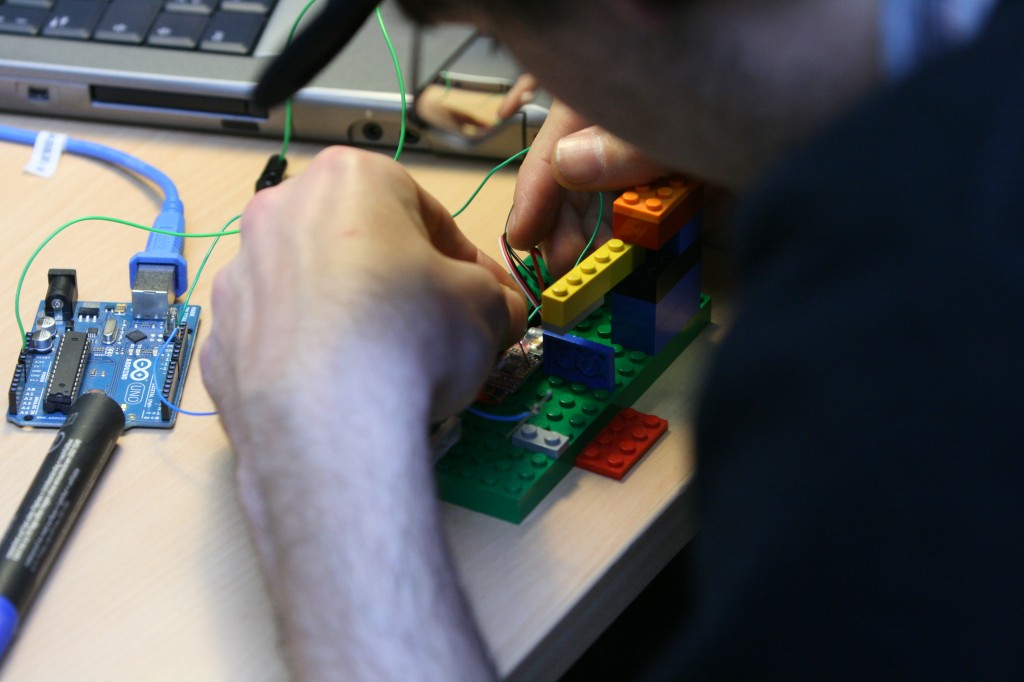
Poking at the pads with tiny sewing needles while the board is being flashed is a tricky job. Too little pressure and the connection won’t be good. Too much pressure and the needles can damage the pad. Gunstick came up with a simple contraption built out of legos.
Note that you need those little LEGO guys to supervise correct placement 🙂
Every hackerspace needs it’s box of LEGOs.
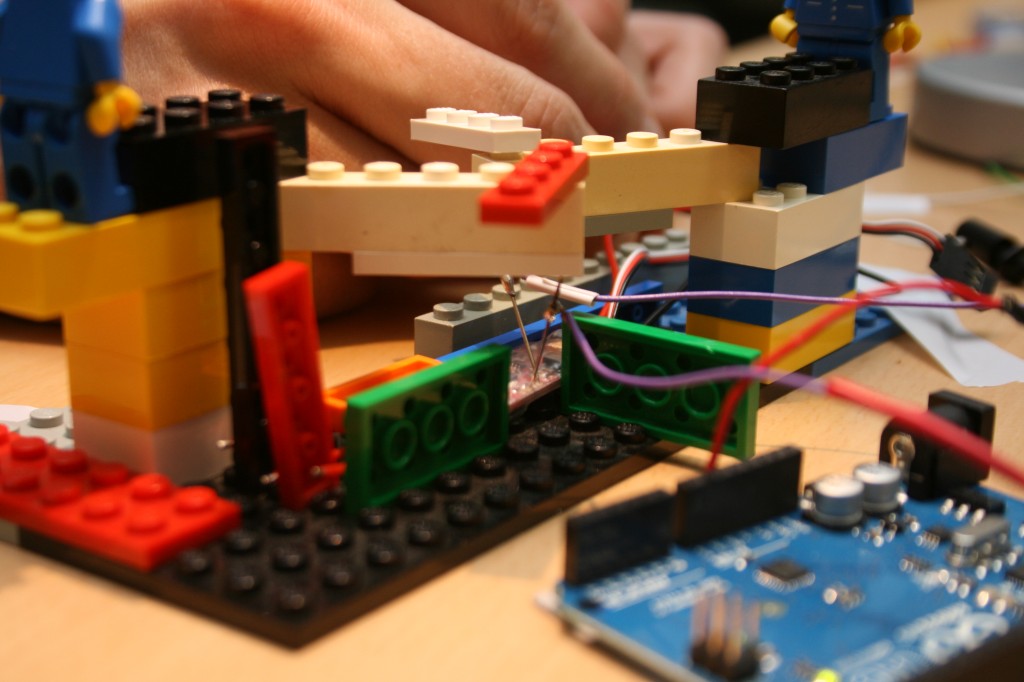
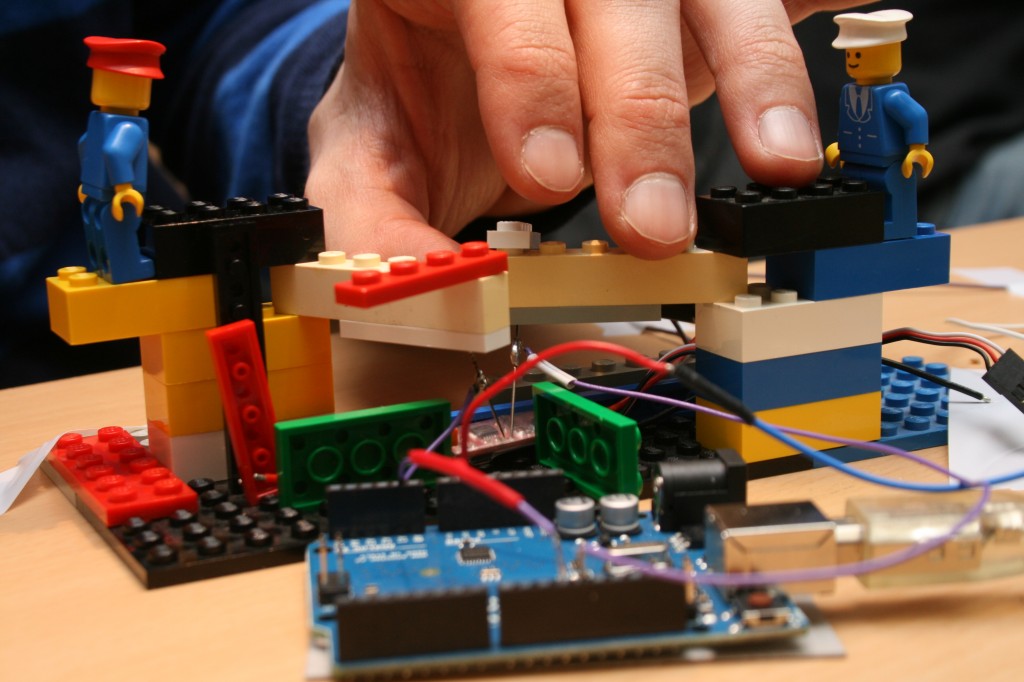
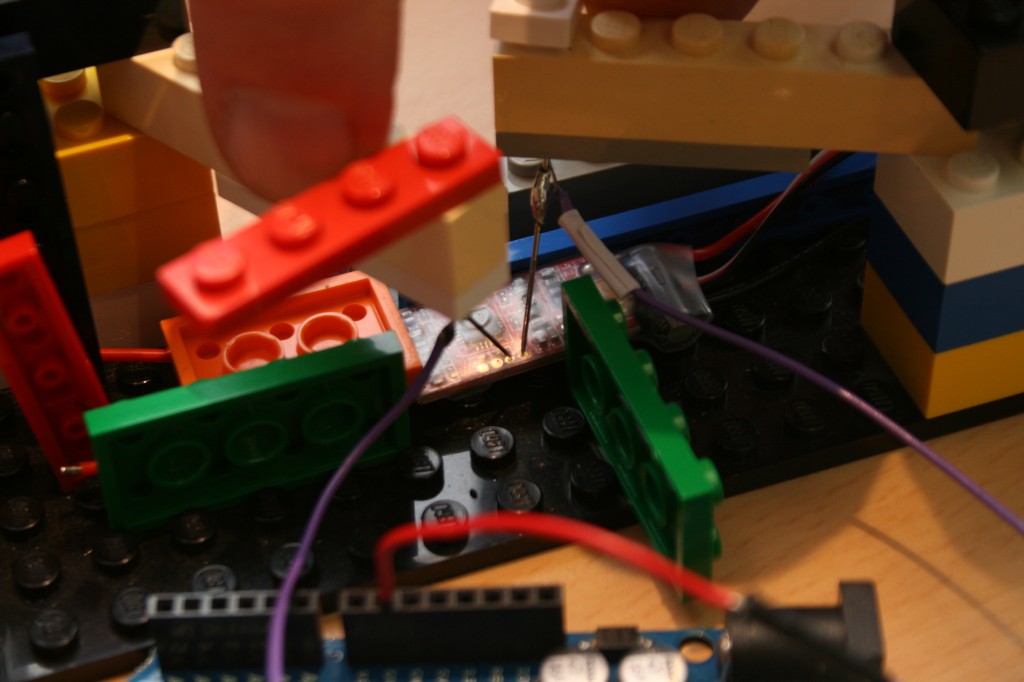
Below you see how needles are correctly placed and held in firmly by the levers.
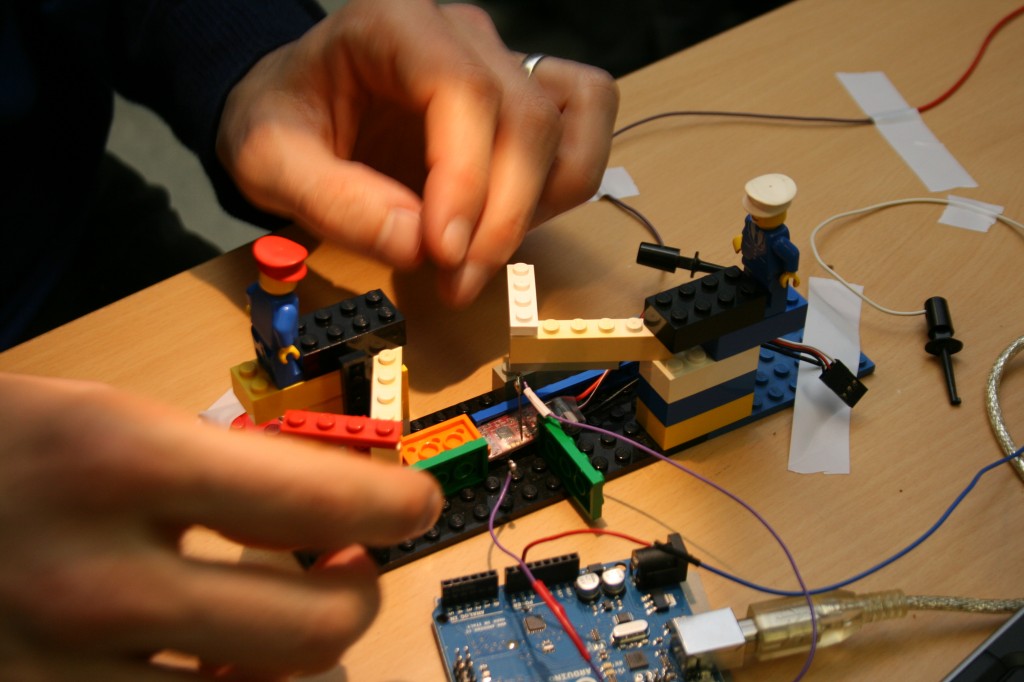
This allowed for quick flashing and swapping of the boards. And of course the ubiquitous arduino was there to do the job.
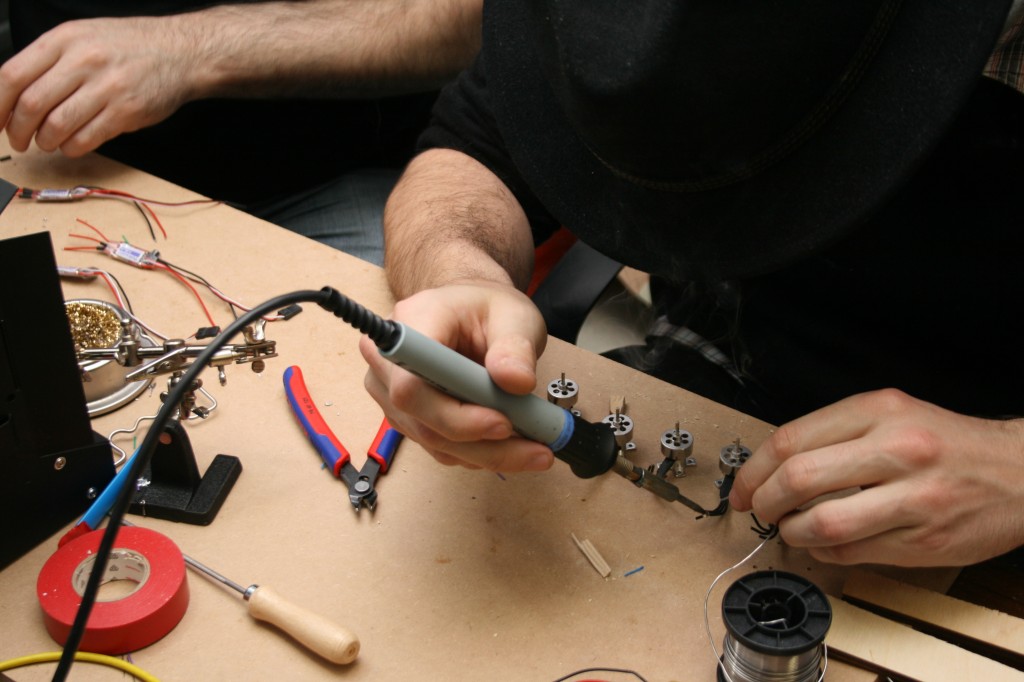
After flashing, the controllers are soldered onto the motors. Half of them upside-down as we need half of them to run in reverse. We’re crossing our fingers on that one.

Never forget to tin the wire leads first. The connections need to be solid.
Meanwhile more flashing is going on.
Yes, it’s using windows. Ye gads!
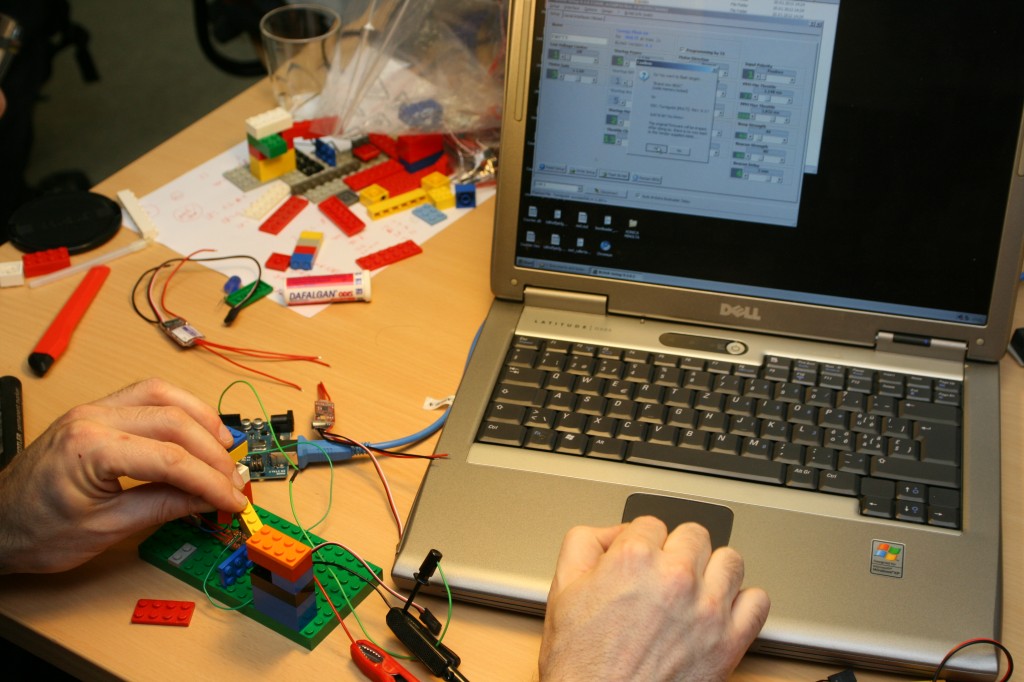
More views of the controller flasher.